
最新バージョン情報
What’s new in V2026
RecurDyn 2026が、2025年11月にリリースされました。主な新機能をご紹介します。
単純形状接触 接触計算点追加オプション
回転円弧・球接触、球・球接触、押出円弧・球接触、ボックス・球接触において、接触力の計算点を追加することが可能になりました。
単純形状接触のベースとなる1点接触では摩擦を精度良く表現できない場合に、「高速・高精度な接触力計算」という単純形状接触の特徴を保ちつつ、接触力計算点を追加して摩擦の影響を精度良く考慮することが可能です。
-
接触計算点の追加OFF (摩擦が発生しない)
-
接触計算点の追加OFF (摩擦が発生)
Geo接触 新たな接触剛性入力タイプ
Geo接触(※)において、新たな接触剛性入力方法として「単位面積あたりの剛性係数」、「接触面圧スプライン」が追加され、面圧の実測データを参考にした設定が可能になりました。
- 単位面積あたりの剛性係数 (Stiffness per Area): 単位面積あたりの剛性係数を入力。
- 接触面圧スプライン (Stiffness Pressure Spline): 干渉量に対する接触面圧のスプラインカーブを設定。
※Geo球接触、Geo円筒接触、Geoロール接触を含む
ディスクブレーキパッドの接触面圧
解析/アニメーション一時停止時のプロパティ表示
解析の一時停止時やアニメーション再生の一時停止時に、各エンティティのプロパティやソルバーの設定などを表示して確認することが可能になりました。
F-Flex/R-Flex 解析/アニメーション一時停止時の節点指定
解析の一時停止時やアニメーション再生の一時停止時に、アニメーションを初期状態にリセットせず、表示しているアニメーションフレームのままで節点を選択することが可能になりました。これにより、大移動した弾性体ボディの節点のコンターへの登録が容易になります。
Durability 複数の解析結果を使用した疲労強度解析
1つのモデルの異なる条件でのダイナミック解析の結果を用いて実施した疲労強度解析を組み合わせた、包括的な疲労強度解析が可能になりました。
各条件での疲労強度解析から作成される応力/ひずみの履歴ファイルを組み合わせて使用することで、様々な稼働条件において起こる各方向における損傷を考慮した疲労強度解析を実施します。
この機能により、各動作条件でそれぞれ実施する疲労強度解析と比較して、精度の良い疲労強度の評価が可能です。
異なる条件での解析結果の組合せによる
疲労強度解析
-
座る・立つ
-
ゆっくりな歩行
-
速い歩行
その他の新機能
- Professional
-
Rマップの機能向上(選択したエンティティのプロパティの表示ウィンドウの追加)
数式による接触の作動条件設定
スクリュージョイントの摩擦 摩擦角度の考慮
センサー反応回数に関する結果出力を追加
- Belt
-
セグメントベルト(Vベルト) 送り方向とくさび方向の個別摩擦設定
- MTT2D/MTT3D
-
摩擦力スプラインと摩擦係数スプラインに対応
-
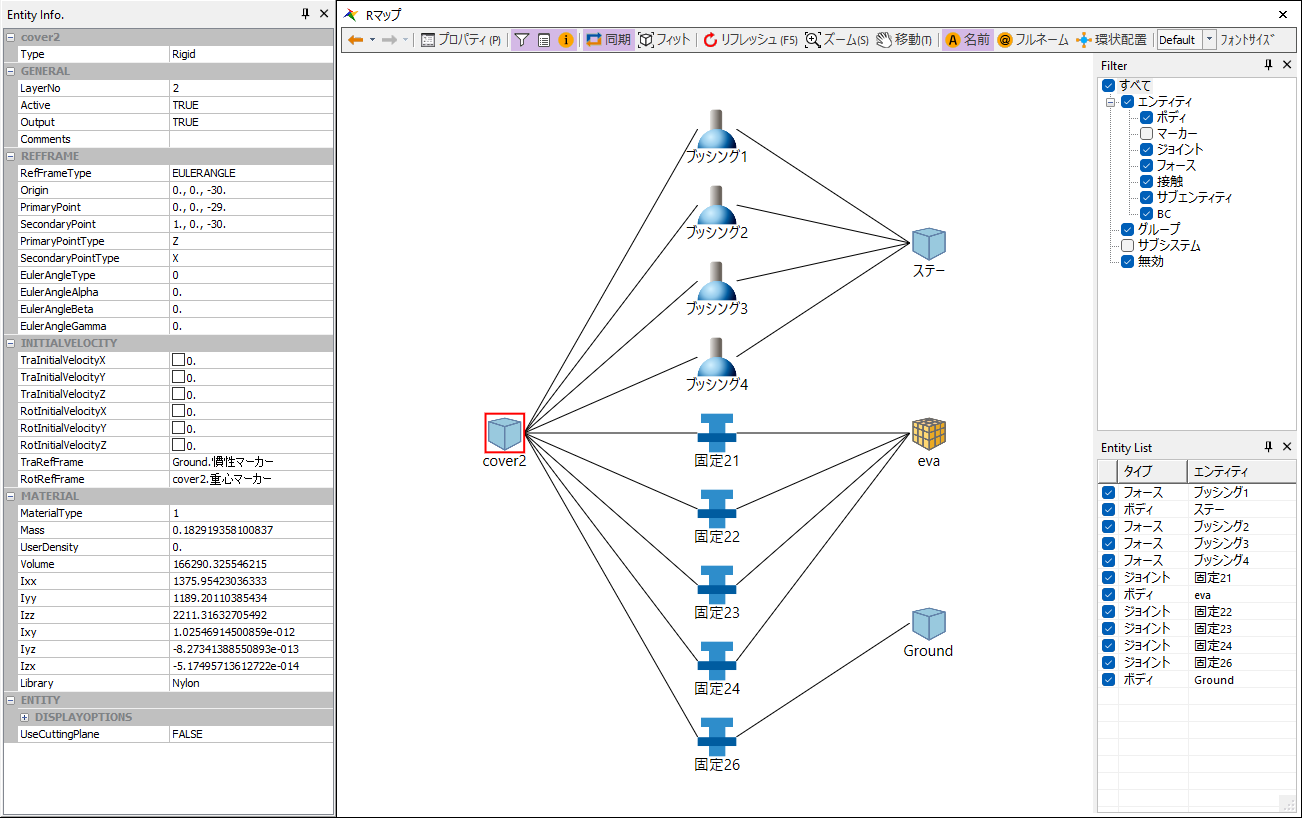
Rマップ エンティティ情報表示
-
数式による接触の作動条件設定
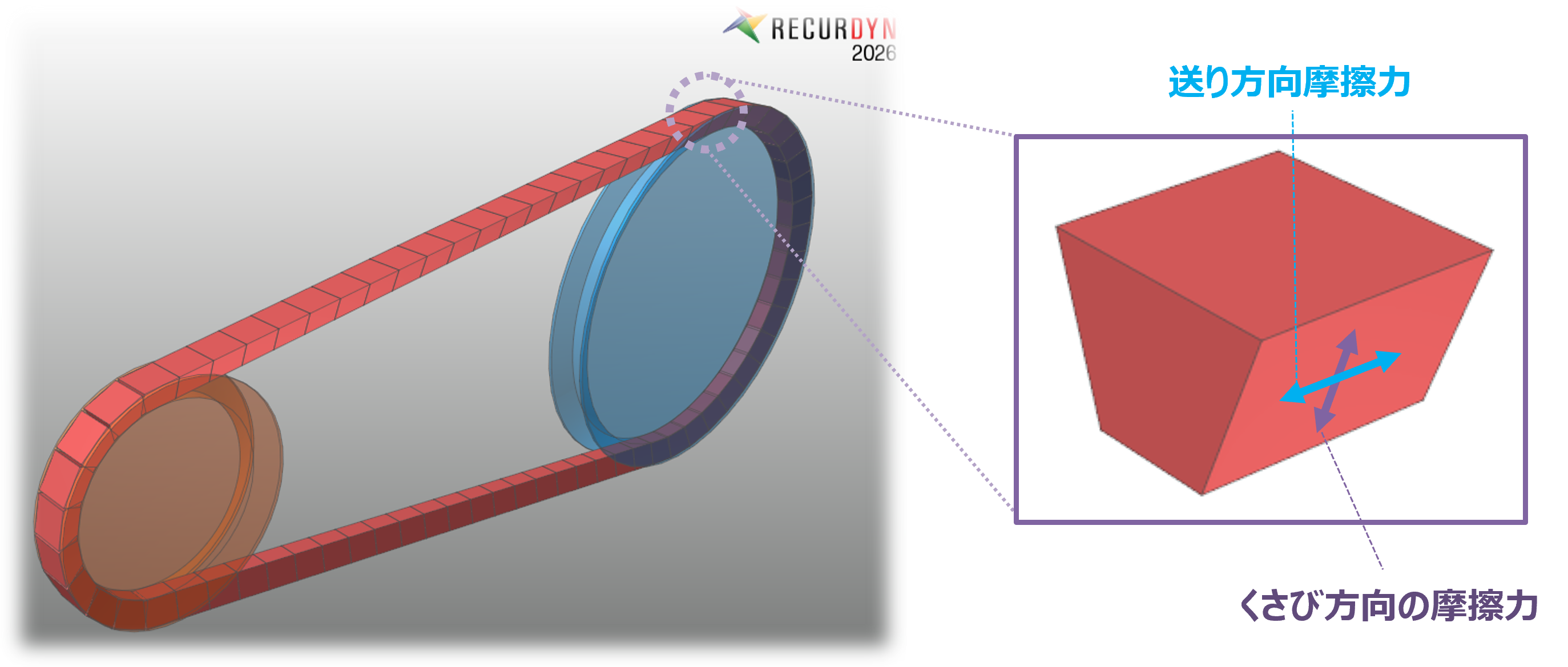
セグメントベルト(Vベルト) 送り方向とくさび方向の個別摩擦設定