
解析事例
ソフトグリッパーロボット
機構解析モデル
大変形の考慮が必要となるソフトグリッパーをRecurDyn/F-Flex弾性体でモデル化し、
スティックスリップを考慮した接触により、
ソフトロボットの把持性能を評価。

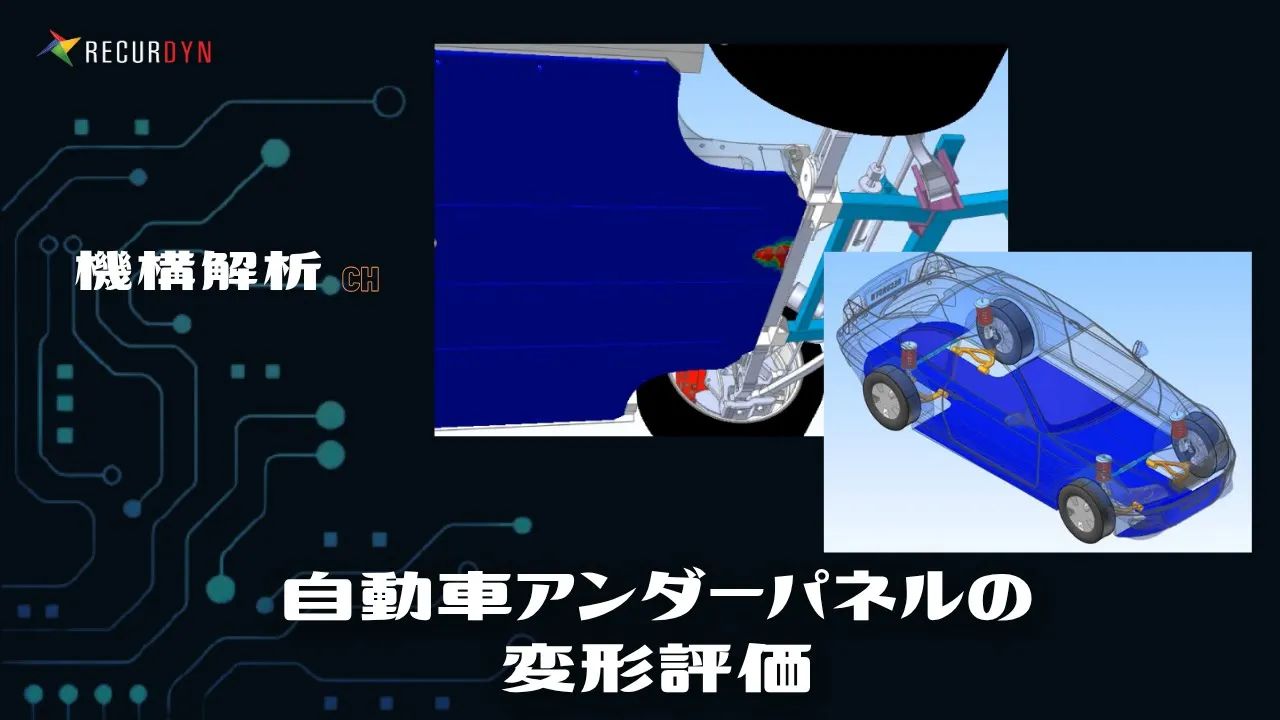
自動車アンダーパネルの変形評価
電気自動車では、バッテリーが車体の床部に配置されることが一般的であるため、アンダーパネルのダメージは車両への重大なダメージになることがある。
大変形・局所変形・塑性変形を扱うことのできるRecurDyn/F-Flexを使用し、障害物や積雪との衝突時の自動車アンダーパネルへのダメージを評価。
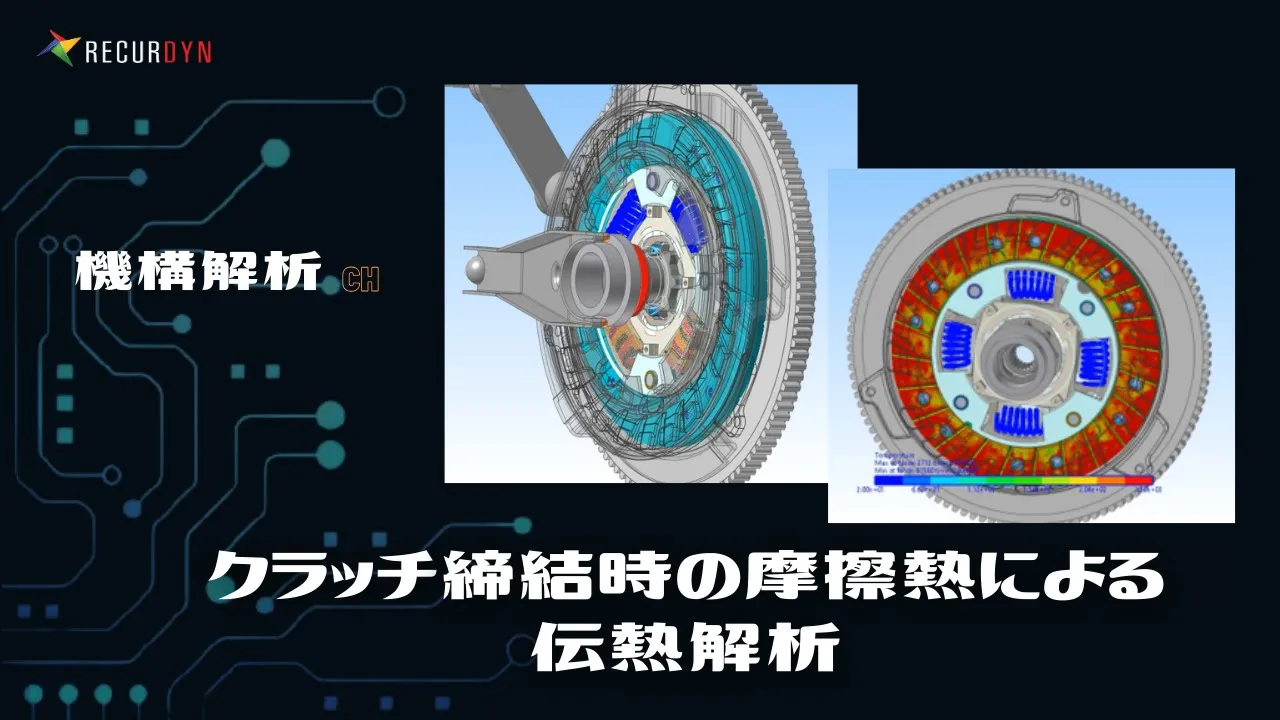
クラッチ締結時の
摩擦熱による伝熱解析
自動車のクラッチ締結時に発生する摩擦熱による温度上昇や、エンジンの動力変動時におけるダンパースプリングの発熱を評価。
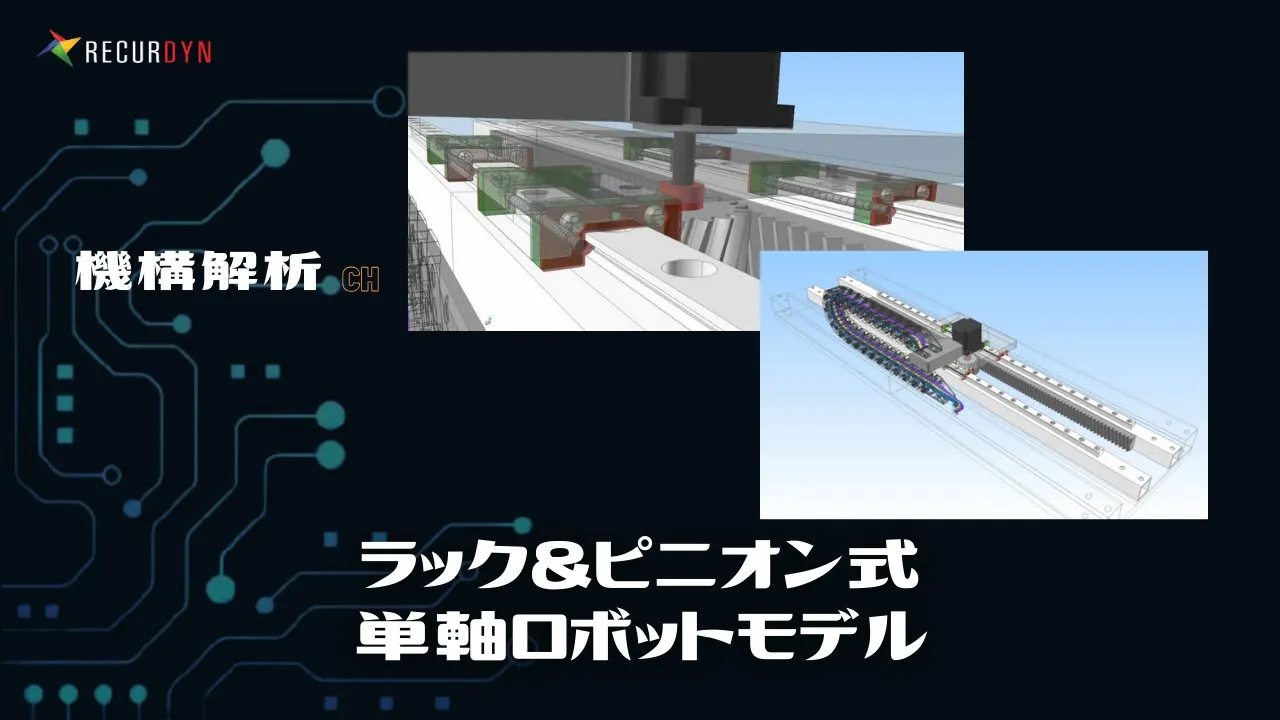
ラック&ピニオン式
単軸ロボットモデル
ラック&ピニオン式単軸ロボット稼働時の各部のバックラッシュや振動、ガタをRecurDynでモデル化し、電線の特性やケーブルに働く慣性力が位置決め精度に及ぼす影響を評価。
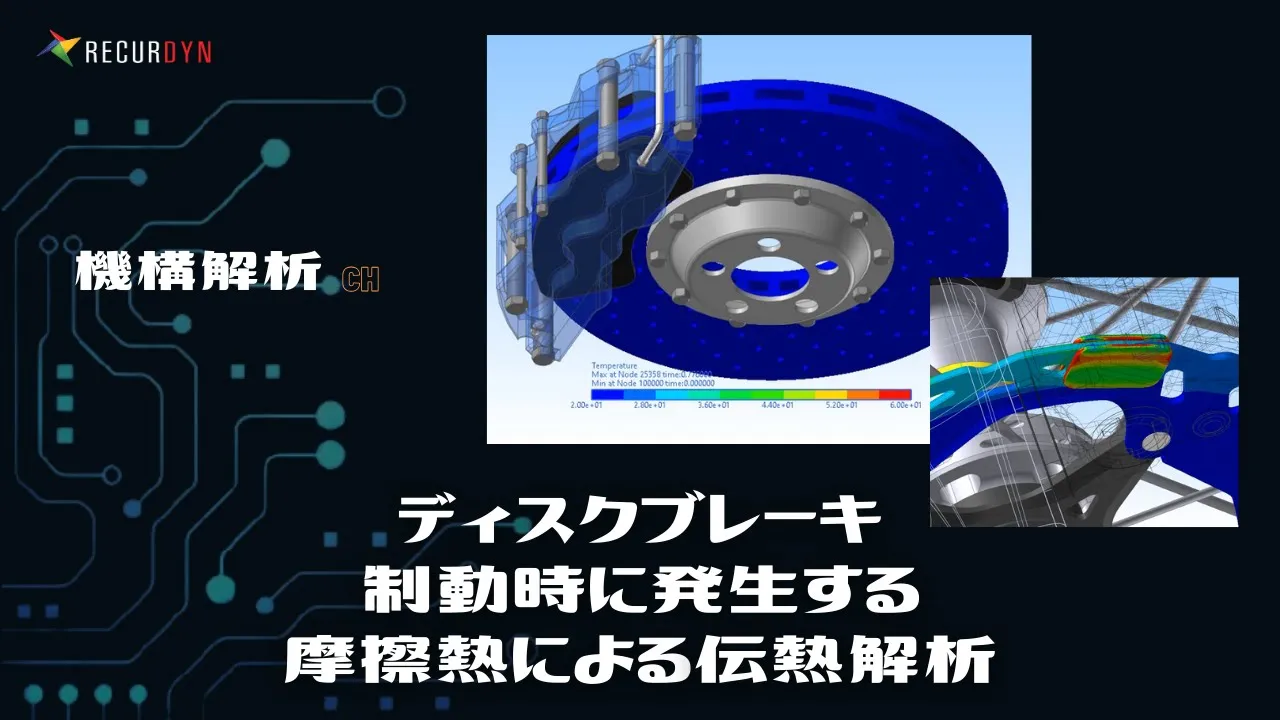
ディスクブレーキ制動時に発生する
摩擦熱による伝熱解析
自動車・自転車用ディスクブレーキの、制動時に発生する摩擦熱によるブレーキローターの温度変化や熱膨張にともなう制動力への影響を評価。
EV用2段減速機
歯車のかみ合いによる伝熱解析
歯車のかみ合いで発生する摩擦熱による、歯車の温度上昇やオイル噴射での歯車表面冷却を評価。

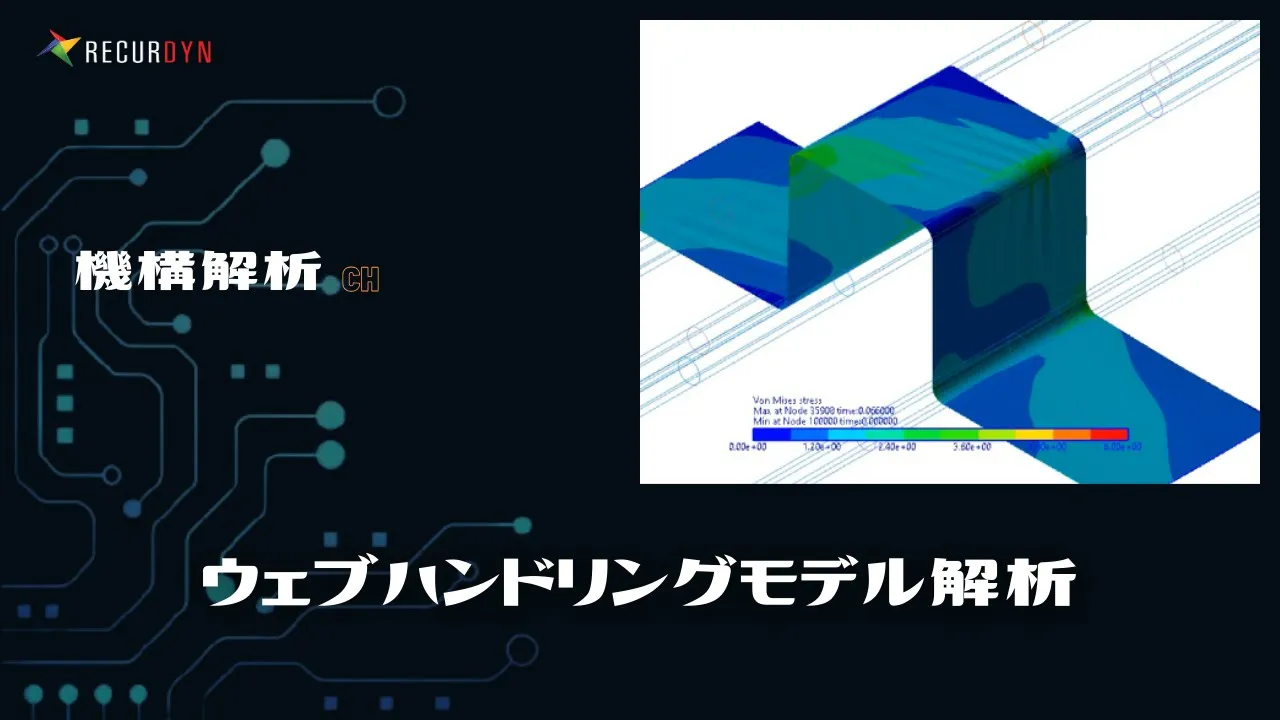
ウェブハンドリングモデル解析
解析モデルに弾性体を含めて、ウェブの搬送や巻き取り時におけるローラー間の「しわ」の発生をを評価。
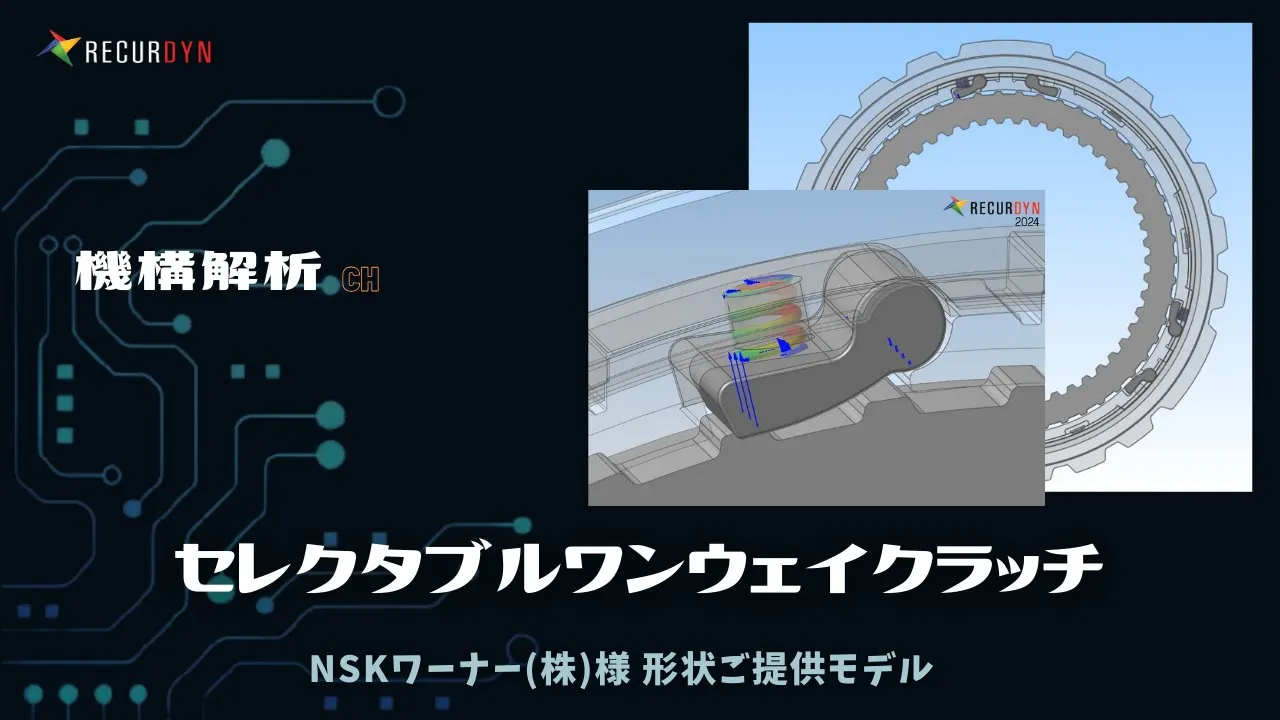
セレクタブルワンウェイクラッチ
【NSKワーナー株式会社様ご提供】
解析モデルに弾性体を含めてラチェッティング時のポール挙動を評価し、動解析でスプリングに生じるひずみ/応力を計算し、疲労寿命を予測。
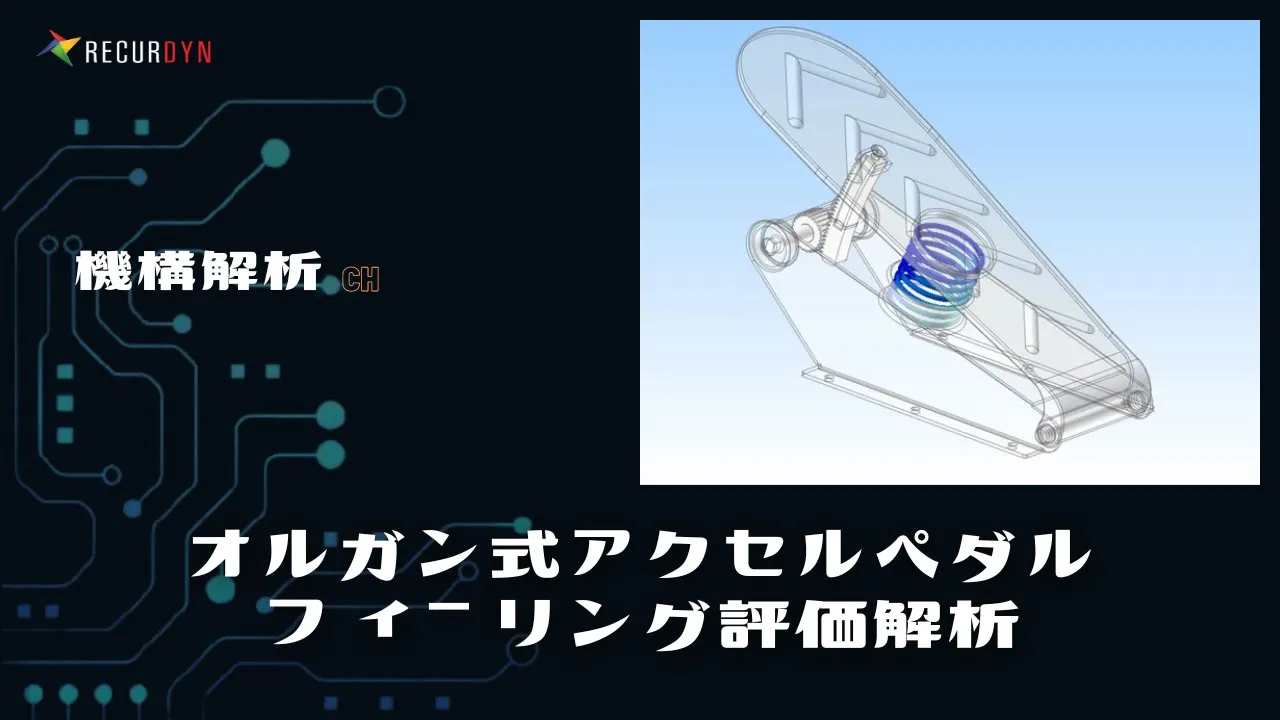
オルガン式アクセルペダル
フィーリング評価解析
解析モデルに弾性体を含めてアクセル操作時のフィーリングの評価やバネの強度・大変形を評価。
産業用ロボット動作解析
【株式会社安川電機様ご提供】
負荷がかかりやすいアームを弾性体でモデル化し、応力や変形を考慮した位置決め精度を評価。
