
解析事例
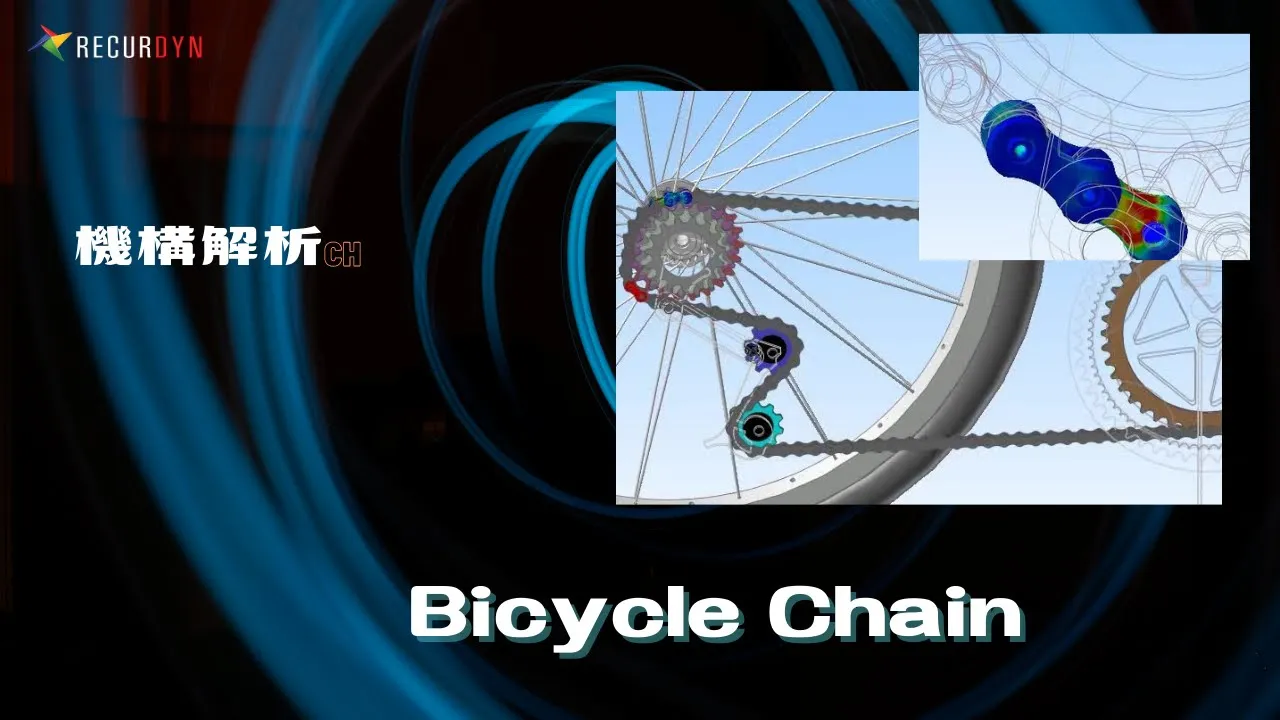
Bicycle Chain
外装式変速機を持つ自転車のチェーンの挙動やチェーンリンクに発生する応力を評価。
超大型ショベルの構造強度解析
【日立建機株式会社様ご提供】
超大型ショベルが稼働する実際の現場からセンサーで取得した掘削動作(荷重、姿勢など)のデータを解析モデルへ入力し、機構と構造連成解析によりブームやアームの強度を評価。適切なメンテナンスや部品交換時期を予測する。

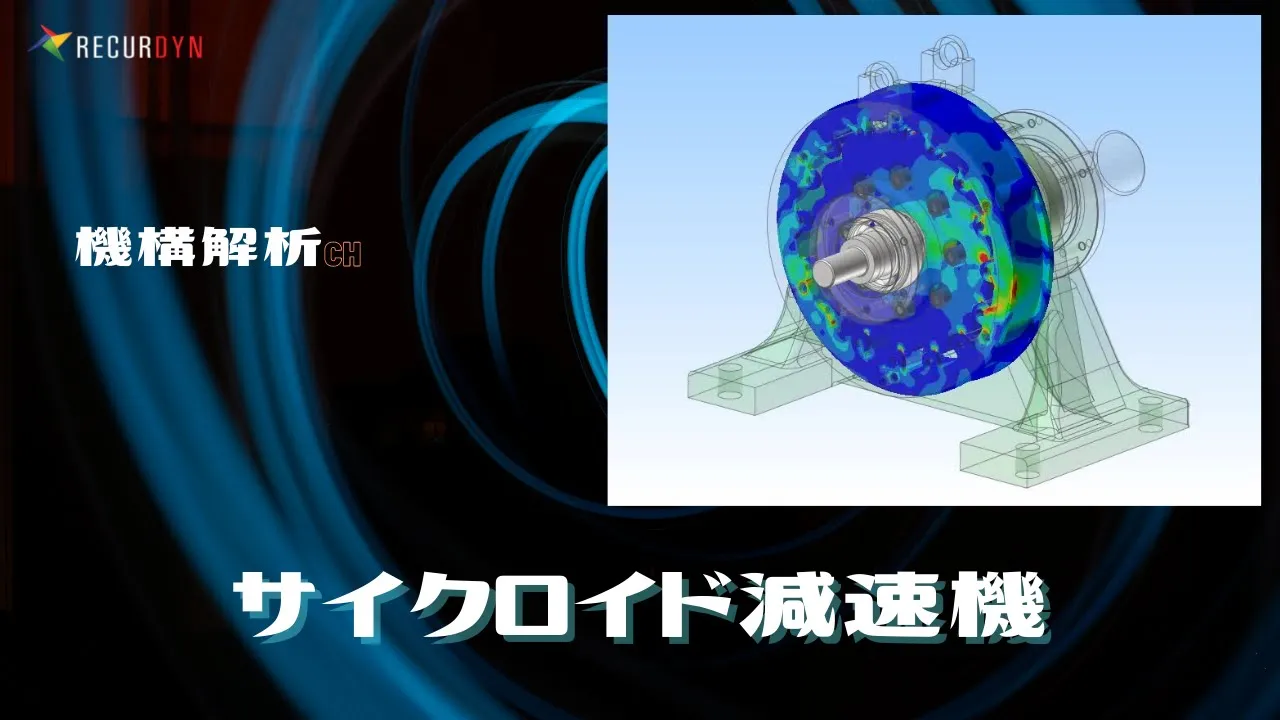
サイクロイド減速機
トロコイド系歯形を有する内接式遊星歯車の自転と公転による高減速比回転伝達挙動(伝達誤差等の動力伝達特性)を解析。
曲線板を直接法のF-Flex弾性体として扱うことで、ピンとの接触部に生じる局所的な応力を評価することが可能。
液晶ガラス基板搬送用ロボット
【株式会社 ファソテック様ご提供】
液晶基板搬送用ロボットは、高速な動作による高精度な位置決め、高剛性の確保が求められる。基板を把持するアーム部分をF-Flex弾性体にすることによって、高速にアームを動かした際の弾性変形(振動)や動的な強度を確認することが可能となる。また、条件違いなど設計検討における比較、また位相最適化ツールでの最軽量形状の応力評価も実現する。

垂直多関節ロボットの挙動解析
【日本電産サンキョー株式会社様ご提供】
2015年にロボット駆動モータのトルク検討用に行った垂直多関節ロボットのサンプル解析例。ロボットの形状・材質により駆動モータ・減速機に要求される特性がどのように変化するかを調べ部品の最適化を行った。

カメラシャッター機構
カメラのシャッター機構の挙動を再現。シャッターを弾性体(F-Flex)でモデル化、薄く軽いシャッターの高速動作時のバタツキを表現。

ボルト締結解析
ボルト締付けの動きを機構解析でモデル化。弾性体の機能で、ボルト締結時の締付けトルクに応じた軸力と伸び量を計算。

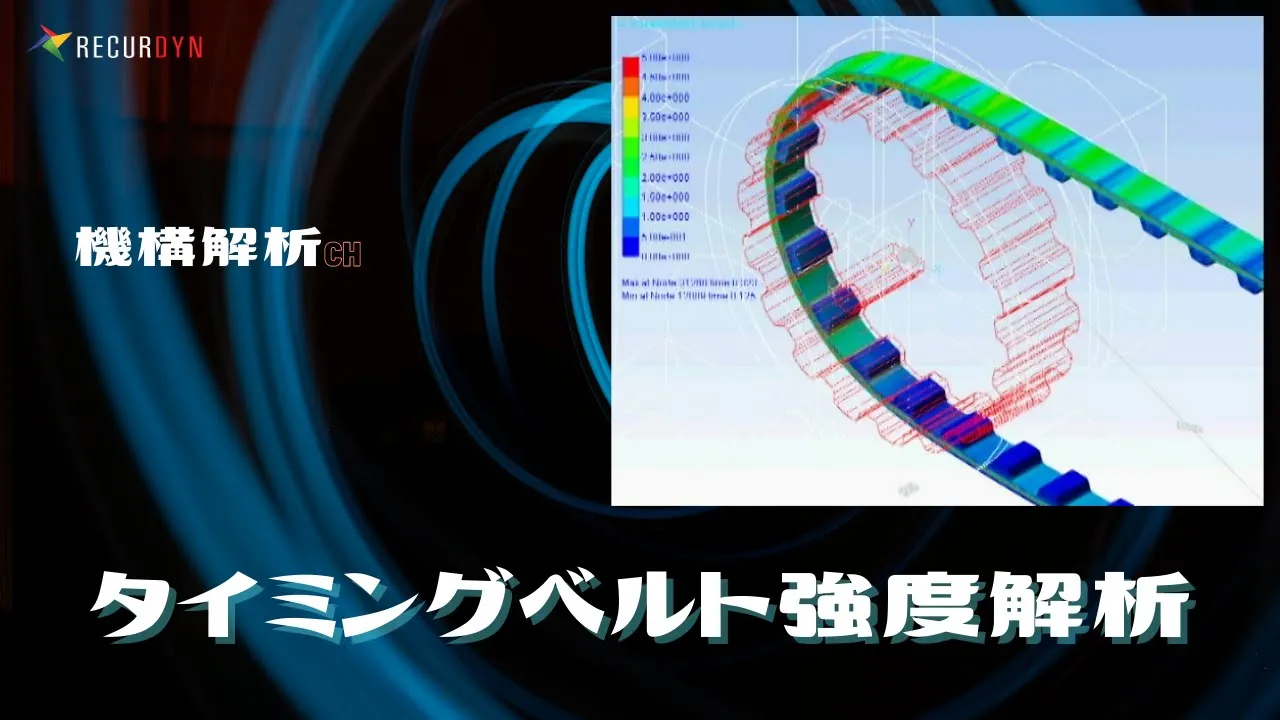
タイミングベルト強度解析
タイミングベルト動作時の応力を求め、強度を評価。芯線はFEMのBEAM要素、ゴム部はSOLID要素でモデル化。SOLID要素には超弾性材料(Mooney-Rivlinモデル)を定義。
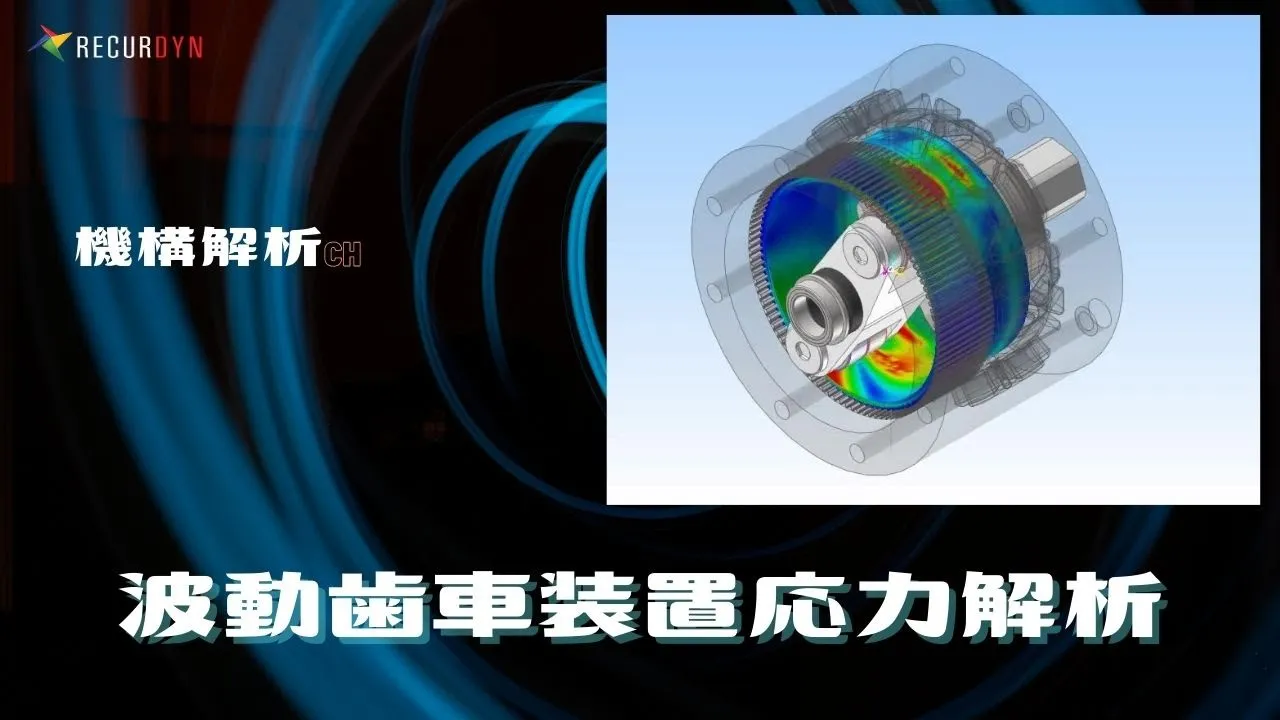
波動歯車装置 応力解析
Circular Splineとのかみ合い位置を順次移動させることにより減速させる。FlexsplineをF-Flex弾性体(ソリッド要素)で扱うことにより、大変形および接触箇所の連続的な移動を計算することが可能。
建機旋回時のアーム・フレーム強度解析
【日立建機株式会社様ご提供】
建機旋回時において、障害物などへ衝突した際の アームや車体フレームの構造強度を事前に検証。
